
目次
LiDARについて
特許を読み解くために、必要な用語を調べつつ、LiDARの基礎知識をまとめてみます。
LiDARの動作原理に関して、Pioneer(パイオニア)のサイトでは、
レーザー光で対象物までの正確な距離を測定し、遠方や周辺の状況をリアルタイムかつ立体的に把握できる走行空間センサー
(走行空間センサーLiDARについて)
と説明されています。
レーザー光を物体に照射し、その反射光を計測することで、距離を測定することができます。
この時に使われる距離計測の方式が、ToF(Time of Flightの略)と呼ばれます。
ToF方式は、車載センサーだけでなく、医療や物流、ロボットなど、物体の形状や空間認識の必要な分野でも広く使われている技術です。
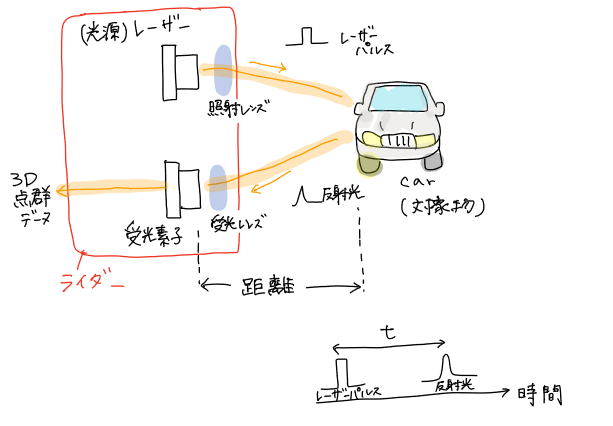
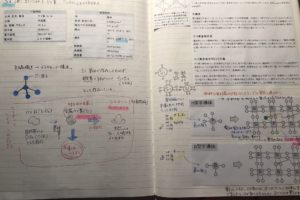
イラストにそって、LiDARのToF方式を用いた計測の流れを説明すると
1、LiDARに内蔵された光源から照射されたパルス状の光が
2、対象物(車や物体、人など)にあたり
3、反射した光(反射光)が、フォトダイオードなどの光センサによって受光され
4、受光した光パルスが、到達するまでの距離や時間を測定し、各ピクセルの距離や奥行きの値が算出され、3D点群データができます
※パルス(Pulse)とは、短時間の間に急峻な変化をする(通常単発の)信号の総称
フォトダイオードとは
フォトダイオードとは、光信号を電気信号へ変換(E/O変換 Electric-optic conversion)する受光素子のこと。
ダイオードの動作原理に触れておきます。
ダイオードの構造は、P型半導体とN型半導体をつなぎあわせた構造です。
P型半導体はプラス(正孔)、N型半導体はマイナス(電子)の性質を持ちます。
P型半導体の電極はアノード、N型半導体の電極はカソードと呼びます。
下記の動画は、ダイオード内を流れる電流の仕組みがよくわかるものでした。
P型半導体とN型半導体の接続する部分をPN接合と呼びます。
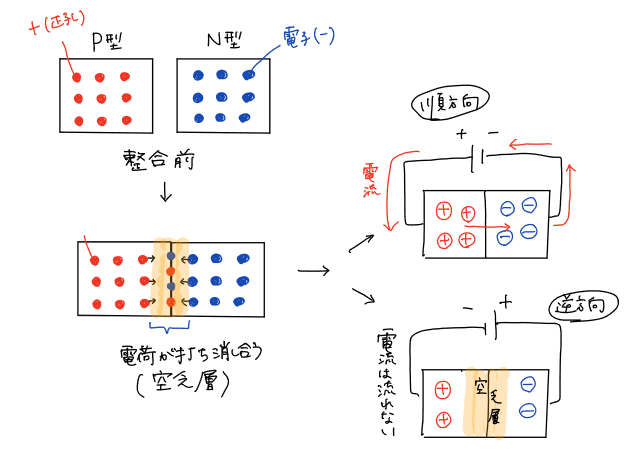
接合すると、P型半導体の正孔(プラス)とN型半導体の電子(マイナス)によって、電荷が打ち消し合い、空乏層と呼ばれる絶縁体の状態ができます。
この状態(PN接合)で、P型半導体にプラス極、N型半導体にマイナス極をつないで電圧をかけると、電子はN型領域からP型領域に流れ込み、電子の動きによって電流が流れます。
一方、逆方向へプラス極、マイナス極をつなぐと、空乏層が厚くなり(つまり絶縁体の層が厚くなり)、電流は流れません。
このように、ダイオードは半導体を用いた、電気の流れを一方通行にする部品のことです。
フォトダイオードは、上の写真のように、PN接合部が光を取り込むための窓(接続部)になっていて、そこへ光を吸収することで、電流が流れます。
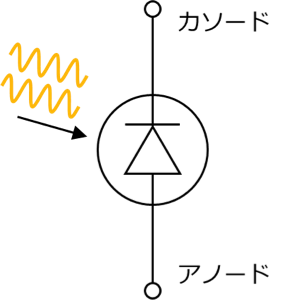
画像:村田製作所より
LiDARを取り巻く企業の動向
1、日本のニコンが、アメリカVelodyne社向けのlidarセンサーの受託生産契約を締結。
(2019年4月25日付ニュースリリース Nikonのサイトより)
2、浜松ホトニクスでは、105度までの高温環境下でも安定したレーザー出力を発揮する「4チャンネルパルスレーザダイオード」を車載LiDAR用に開発。
矢野研究所のニュースリリース(2018年6月)でも、
レーザ/LiDARはレベル3以上の自動運転車の増加に比例して出荷数量は推移し、2030年の世界市場規模は4,959憶円を予測
と書かれています。
まずは日本の主要な企業のサイト→特許→海外の大手メーカーなどの順で、情報収集しました。
やればやるほど、奥が深く、他分野への横展開も視野を広げていくべき技術だと思います。
やりだすと止まらないので、いったんペンディング。
興味のある分野であることは間違いなしです。
LiDARと特許
LiDARで特許をいくつか検索しました。
レベル3、4の自動運転を実現化するための技術として、注目をされているLiDAR。
明細書上では、光検出および測距(Light Detection and Ranging)と説明されています。
【発明の名称】半導体装置
【技術分野】
【0001】
本開示は一般に、環境のセンシングに関し、より具体的には、光検出および測距(Light Detection and Ranging:LIDAR)アプリケーションに関連するコンポーネント、システム、および技術に関する。
【背景技術】
【0002】
知的機械(例えば、ロボティクス)は、その性能が絶えず増大し、コストが下がるにつれて、現在、多くの分野で広く使用されている。知的機械の代表的な用途には、作物の監視、不動産の写真撮影、建物や他の構造物の調査、防火用途、国境パトロール、および製品配送などが含まれる。障害物検出および他の機能のために、知的機械が障害物検出および周囲環境スキャニング装置を装備することは有益である。光検出および測距(LIDAR、「光レーダ」としても知られる)は、信頼性があり正確な検出を提供する。しかしLIDARシステムが外部環境の精密なモデルを得るためには、外部環境からの高品質なデータ信号を必要とする。このような要件は、LIDARシステムの光学部品および電気部品の製造の複雑さおよびコストを増大させる可能性がある。従って、知的機械やその他の装置によって運ばれるLIDARシステムを実装するために、改善された技術が依然として必要とされている。
【0019】
前述の知的機械は、障害物を独力で検出することができ、および/または回避行動に自動的に従事できることが重要である。光検出及び測距Light Detection and Ranging:LIDAR)は、信頼性があり正確な検出技術である。LIDARはさらに、従来の画像センサ(例えば、カメラ)とは異なり、物体までの深度または距離を検出することによって、3次元情報を取得することが可能である。
光の速度(光速度)はもちろん目に見えません。
真空中の光速度は、 299792458 m/s(毎秒あたり30万キロメートル)と定義されています。
こちらの動画で、光の速度を体験できます。
このような動画が無料で見られる時代。
勉強素材はそこら中に転がっています。
そこから選別して、優先順位をつけて、ゼロからまずは1の力を広くつけていきます。














コメントを残す