
目次
はじめに

自動車の運転免許を取得したのは、大学在学中でした。
教習所では、ハンドルを握りしめ、サイドミラーやルームミラーを同時に確認して、前方・後方・サイドに常に注意を配りながら走行する、といった実習を受けました。
「かもしれない運転」と呼ばれる危機予測が常に必要で、停車中の車の影、死角になっている場所からの急な飛び出しなど、あらゆることが起こるかもしれないと、緊張感をもって運転することが求められます。
私は免許を取得して、もう20年近くになります。
ペーパードライバーの時よりは緊張感もなくなり、ある程度どのような場所(死角にになっている場所)で飛び出してくる可能性が高くなるか、車間距離や車線変更のタイミングの取り方、サイドミラーやルームミラーを同時に確認することも感覚的にできるようになっています。
自動運転の定義(レベル分け)でいうと、私が日々運転をしている状況がレベル0になります。
人間が数十年かけて、経験値を積み重ね、車両感覚をつけてきた運転技術と同程度のものが、自動運転ではどのくらい可能なのか。
そんな素朴な疑問から、今注目されている自動運転について考察してみます。
では、自動運転の定義とはどういうものでしょうか。
自動運転の自動化レベルとは
自動運転は、自動化のレベルをレベル0~レベル5に分けて定義しています。
レベル分けには、自動車関連及び航空宇宙関連の標準規格の開発を行う、アメリカのSAEインターナショナルと呼ばれる非営利団体が定めた規格J3016の定義を採用しています。
SAEインターナショナルのサイトにも以下のように書かれています。
SAE International recently unveiled a new visual chart (below, and in gallery) that is designed to clarify and simplify its J3016 “Levels of Driving Automation” standard for consumers. The J3016 standard defines six levels of driving automation, from SAE Level Zero (no automation) to SAE Level 5 (full vehicle autonomy). It serves as the industry’s most-cited reference for automated-vehicle (AV) capabilities.
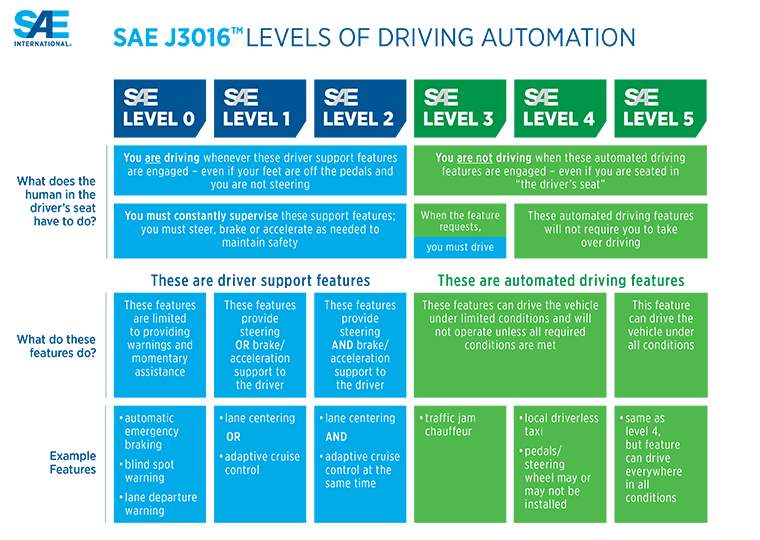
運転自動化なしをレベル0として、完全運転自動化はレベル5になります。
運転者(人間)と運転自動化システムのお互いの役割や関係性に応じてレベル分けされています。
SAEインターナショナルのテクニカルペーパーの口語定義を参照すると、
レベル0(運転自動化なし)
運転者がすべての動的運転タスクを実行する(予防安全システムによって支援される場合も含む)
レベル1(運転支援)
運転自動化システムが、動的運転タスクの縦方向又は横方向のいずれか(両方同時ではない)の車両運動制御のサブタスクを特定の限定領域において持続的に実行。 この際、運転者は残りの動的運転タスクを実行する事が期待される
レベル2(部分運転自動化)
運転自動化システムが、動的運転タスクの縦方向及び横方向両方の車両運動制御のサブタスクを特定の限定領域において持続的に実行。 この際、運転者は動的運転タスクのサブタスクである対象物・事象の検知及び応答を完了し、システムを監督する事が期待される
レベル2までが、運転者がすべてあるいは一部の運転を行います。
あくまで主体は運転者です。
現在私が所有の車に搭載されている機能を例にあげます。
前方車両への衝突被害の軽減や事故回避のために、レーザーレーダーと単眼カメラで検出し、警報ブザーで知らせる機能が搭載されています。この場合はレベル0になります。
高速道路走行中に車線の中央付近を維持するようにハンドルを回す操作を支援するLKAS(車線維持支援システム)、前を走行する車両との車間距離を維持し走行する渋滞追従機能付きACC(アダプティブクルーズコントロール)などが搭載されている場合は、レベル1になります。
レベル2は、車線を維持しながら前方車両に追従して走る(LKAS+ACC)状態のことです。
レベル3から、主体が運転者ではなく、運転システムが主体になります。
SEMICON Japanのセミナーで話の中心となっていたのは、レベル3~4でした。
レベル3(条件付運転自動化)
運転自動化システムが全ての動的運転タスクを限定領域において持続的に実行。この際、作動継続が困難な場合への応答準備ができている利用者は、他の車両のシステムにおける動的運転タスク実行システムに関連するシステム故障だけでなく、自動運転システムが出した介入の要求を受け容れ、適切に応答することが期待される。
レベル4(高度運転自動化)
運転自動化システムが全ての動的運転タスク及び作動継続が困難な場合への応答を限定領域において持続的に実行。作動継続が困難な場合、用者が介入の要求に応答することは期待されない。そしてレベル5は完全自動化です。
車両運転制御、対象物などの検知などすべて運転自動化システムが行い、限定なしの領域で使用される状態です。
レベル3、レベル4の世界
自動運転開発を進める自動車メーカーでは、特に海外ではあらゆる実証実験が行われています。
Googleセルフドライビングカープロジェクトとして設立し、2016年に誕生した自動運転開発企業の Waymo(ウェイモ)では、一部のエリアで自動運転タクシーの商用化がスタートしています。
完全自動化ではなく、念のため運転席にはセーフティードライバーが同乗しているようです。
それでも、運転を経験している私から見ると、信じられない光景です。
これがそう遠くない未来に、当たり前になっている、そんな時代を想像するとワクワクします。
乗車する際は、WaymoOne という専用アプリを使用します。
車載用センシング技術
ブログの冒頭でも書きましたが、運転の最中にいちばん気を付けているのは、「視界」と「危険を予測する」ことです。
視界は前方だけではなく、横や後ろに目をやりながら、走行します。
車線を確認し、前方車両との車間距離を一定に保ち、同時に後方車にも注意が必要です。
自動運転でも、この「人間の目」と「脳」の役割を果たす部分が、大変重要になってきます。
自動運転において、対象物(先行車や歩行者、障害物など)に関する情報をセンサーなどを使用して計測するセンシングと呼ばれる技術が、「人間の目」の部分を担うことになります。
すでに車載センターとしてカメラやミリ波レーダーは搭載されていますが、これらに加えて重要なセンサーがLiDARと呼ばれるセンサーです。
LiDAR(ライダー)
LiDARとは、Light Detection and Rangingの略語で、日本語ではライダーと呼ばれます。
LiDARの基本的な原理は、パルス状にレーザー光を照射し、対象物(先行車や歩行者など)に当たって跳ね返ってくるまでの時間を計測し、対象物までの距離や方向を測定するものです。
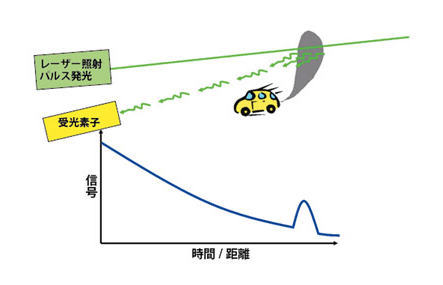 引用:アルゴ
引用:アルゴ
測定した情報は3D点群の情報として取得できます。
Lidarで得た3D点群情報は、ダイナミックマップと呼ばれる3次元情報を持つ高精細な地図を照合して使うことになります。
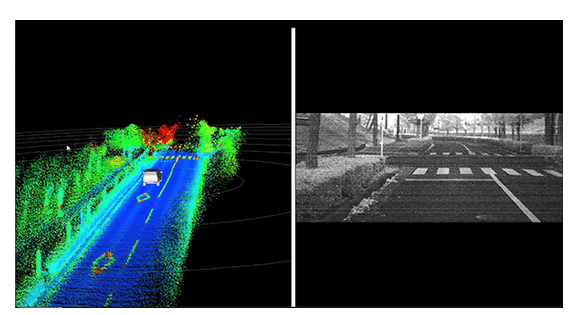 東陽テクニカさんのサイトよりお借りしました。
東陽テクニカさんのサイトよりお借りしました。
左が3D点群、右が2D画像です。
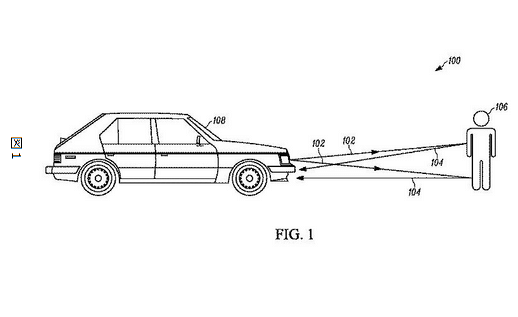
LiDARの動作原理について特許もいくつか調べました。
【発明の名称】多波長LIDARシステム
【出願人】
【氏名又は名称】オプシス テック リミテッド【発明を実施するための形態】
【0010】
図1は、車両に実装される、本教示のLIDARシステム100の動作を図示する。LIDARシステム100は、標的場面に向かって光源によって生成された光ビーム102を投影する、照明器とも称される、レーザプロジェクタと、その標的場面における人物106として示される物体から反射する光104を受信する、受信機とを含む。LIDARシステムはまた、典型的には、物体106についての距離情報を反射光から算出する、コントローラと、所望の範囲および視野(FOV)を横断して静的パターンであり得る、光の特定のパターンを走査または提供し得る、要素とを含む。受信機およびコントローラは、受信された信号光を、LIDARシステム範囲およびFOV内にある周囲環境の点毎3Dマップを表す、測定値に変換するために使用される。種々の実施形態では、コントローラは、特定の用途に応じて、単純電気回路またはより複雑なプロセッサであることができる。
【0011】
照明器および受信機を形成する、レーザ源および光学ビーム投影手段は、車両108の正面側に位置してもよい。人物106および/または車もしくは電柱等の別の物体は、源から受信機に反射された光を提供し、その物体までの範囲または距離が、判定される。当技術分野において公知のように、LIDAR受信機は、光源から放出される光パルスの飛行時間測定に基づいて、範囲情報を計算する。加えて、特定の範囲と関連付けられ、源およびプロジェクタシステムの特定の設計に基づく、標的平面内の場面を照明する、光学ビームプロファイルについての既知の情報が、反射表面についての場所情報を判定し、それによって、場面の完全なx、y、zまたは3次元写真を生成するために使用される。言い換えると、周囲環境の点毎3Dマップは、LIDARシステムの視野内の源からの照明を受信機に反射させる全ての表面からの位置情報を示す、測定データの集合を表す。このように、LIDARシステムの視野内の物体の3D表現が、取得される。点毎3Dデータマップはまた、測定点群と称され得る。
 動作原理については、大まかに理解できます。
動作原理については、大まかに理解できます。
車載LiDARは、小型、低コストが求められています。
そのため、可動部をもたないソリッドステートLiDARの開発が注目されおり、この開発には半導体技術が不可欠です。
ソリッドステートLiDARの販売をしている企業のひとつが、東陽テクニカ。
東陽テクニカのLiDARは、稼働部分と回転機構がないため、車両に設置する場所の選択肢が広がります。
ソリッドステートLiDARについて、ベンチャー企業なども含め開発が進められていて、注目の技術です。
半導体に関する勉強もかねて、もう少し自分の中で理解を深めて、次回記事にしたいと思います。
****今日はここまで****

















コメントを残す