
目次
体幹を鍛える
体が資本。
まずは元気でなくては、勉強も仕事も遊びも、憂鬱になってしまいます。
そのためには、運動を継続していくことが大切ですよね。
毎日運動を続けることがいちばんの理想です。
ただ、毎日ジム通い、毎日ジョギングなど、あらためて時間を割くことが厳しい状況です。
現在は、何よりも机に向かう!と決めているので、ジム通いは一時ストップしています。
それでも、週1回のヨガは続けています。通い始めて6年ほど。週1回でも効果を実感しています。
ダイエットためではなく、体幹のずれを矯正するためです。
「自分の体の重心を意識して、自分の足で自分の体を支える」というタイプの体幹トレーニングを重視したヨガになります。
さて、ヨガのポーズに、ウールドゥヴァハスターサナ (手を上にあげるポーズ) があります。

ヨガの先生にいつも指摘を受けるのが、このポーズをしている時、私の体の軸が前に傾いているということです。
自分の感じているまっすぐの姿勢よりも、本来の直立(手を挙げた時の)は、後ろにもう少し体を傾けなくてはいけません。
なぜでしょうか?
重心線を意識する
正しい直立姿勢を考える時に大切なことは、重心線です。
耳孔、肩、大転子(股関節)、膝関節後方、足関節前方のそれぞれの重心を垂直に結んだ線のこと
この重心線が地面から垂直になっていることで、体は正常な直立を維持します。
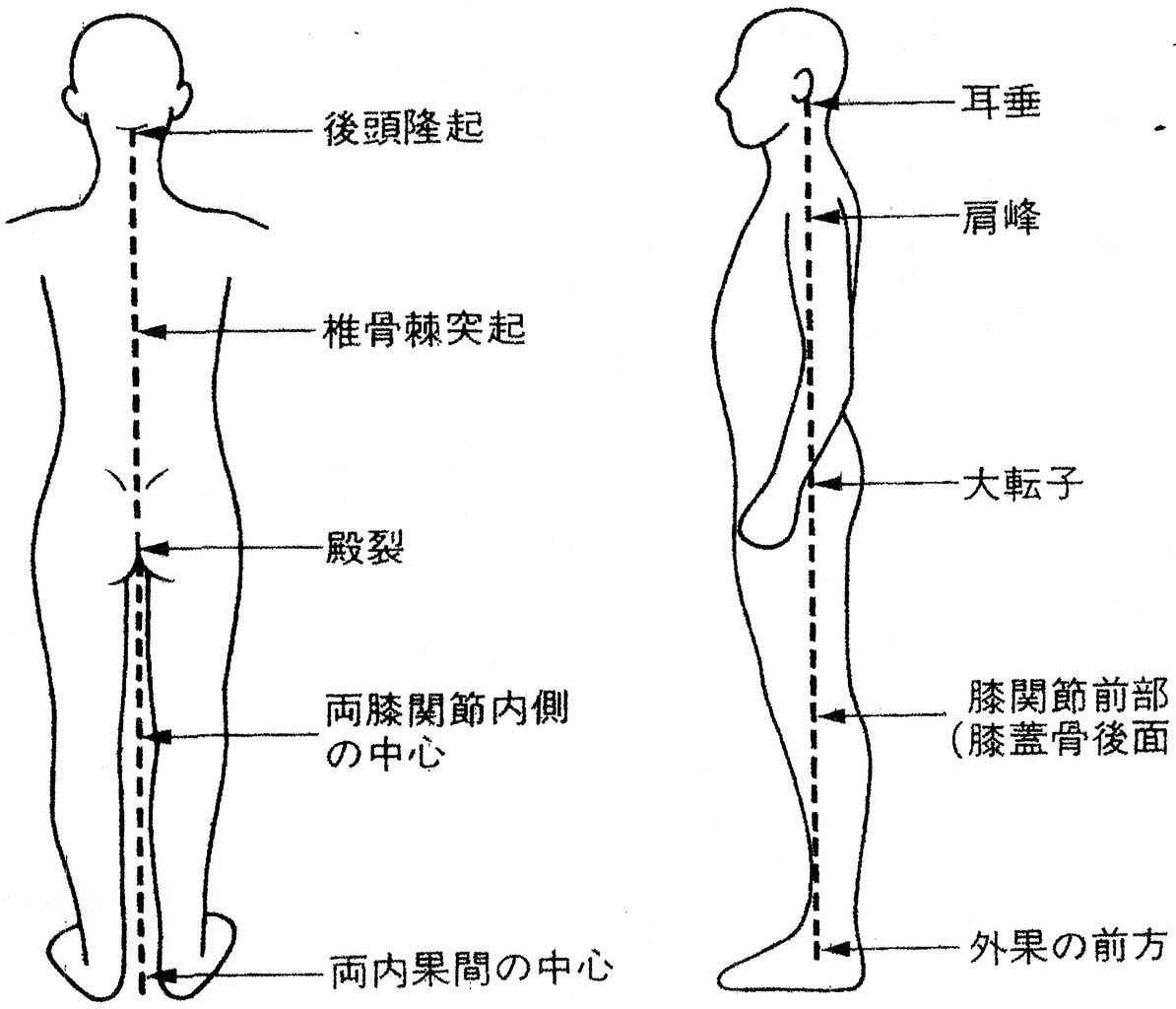
下記のイラストは、左側(A)が正常な直立姿勢です。重心線が、体の真ん中をまっすぐに通っています。
おそらく、私の場合は、B~Dのように、重心線に対して、自分の体が前傾きの状態になっているのだと思います。

ウールドゥヴァハスターサナ のポーズでは、直立姿勢からさらに手を上にあげます。
そのことで、体の重心の位置が上にあがってしまいます。
重心は高いより、低いほうがバランスをとりやすいですよね。
お相撲さんを想像してみてください。
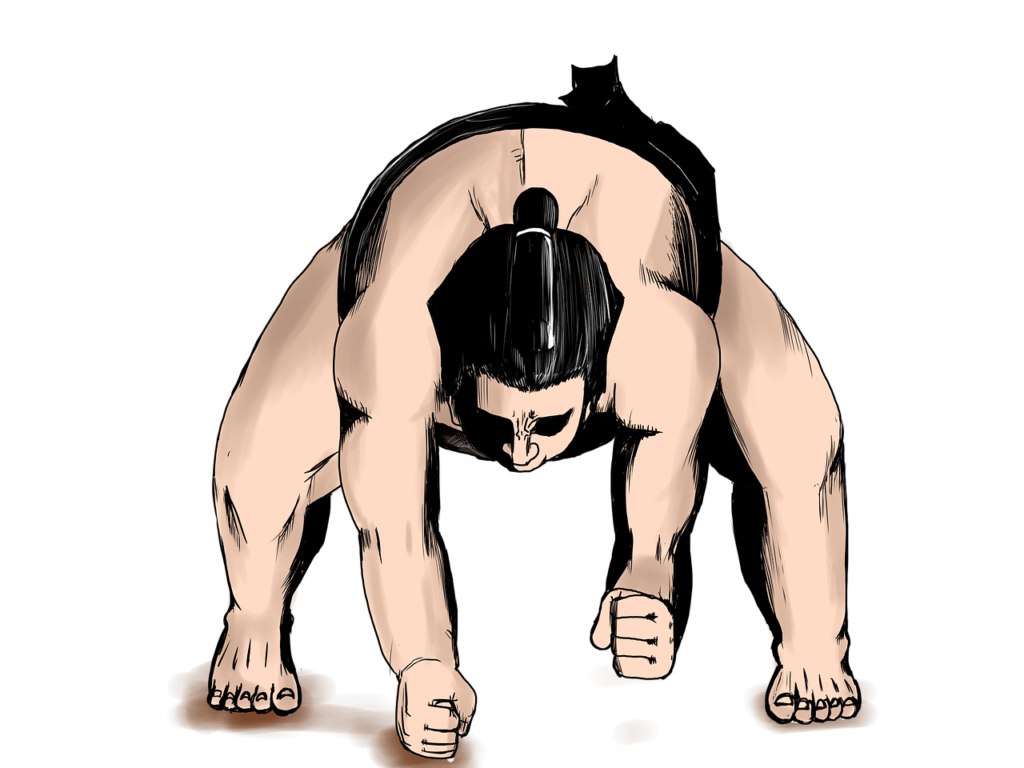
激しいぶつかり合いをしても、バランスを崩さず体を安定させるために、四股を踏んだ姿勢をしています。
バランスをとろうとする時に、腰を低くするのは、重心を低くすることで、不安定から安定の状態にするためです。
地面と接する面積は広く
体を安定させるために、もうひとつ大切なことが支持基底面です。
体を支えるために床と接している部分を結んだ範囲のこと

この面積が広いほど、安定な状態になります。
例えば、杖を使う場合、両足と杖の3つを囲む範囲に支持基底面が広がるので、より安定した状態になります。
この指示基底面の中心となる部分に、体の重心があると、体はグラグラせずに安定した姿勢を保つことできます。
逆に、指示基底面の範囲から重心がずれてしまうと、体は傾いたり、転倒したりしてしまいます。
ヨガのウールドゥヴァハスターサナのポーズは、手をあげることで重心が高くなり、また両足は開かず閉じた状態で直立するので、とても不安定な姿勢になるのです。
このポーズの難しさは、不安定な状態をいかに維持し続けるかということです。

特許明細書と支持基底面
指示基底面の考えを特許明細書に調べてみました。
福祉用具などにこの概念が使われているものが多くありました、もうひとつ自動運転の技術に、支持基底面の概念が使われていました。
自動運転では、歩行者を検出し、自動ブレーキをかける精度が重要になってきます。
歩行者が直進している以外に、障害物をよけて直線から横にそれたりする場合も早期に検出する必要があります。
そこで、歩行者が障害物などを回避して横にそれる行動を、支持基底面と体重心との関係と角度から分析し、算出する装置の特許がでていました。
両足が地面についている(支持基底面が広い)場合の重心がどの位置にあるか、また片足だけが地面についている(支持基底面が狭い)場合には重心がはみ出しているなどの数値を算出し、直進行動と左右行動の差異を分析して、自動ブレーキに反映する装置でした。
【公開日】平成29年11月30日(2017.11.30)
【発明の名称】歩行者回避行動検出装置
【出願人】
【氏名又は名称】マツダ株式会社
【技術分野】
【0001】
本発明は、歩行者回避行動検出装置に関するものである。
【背景技術】
【0002】
車両にあっては、前方を撮像するカメラによって検出された歩行者と衝突する可能性があると判定された際に、自動ブレーキ等の安全装置を作動させることが行われている。特許文献1には、歩行者の特定の部位と他の部位との相対的な状態から精度よく歩行者であるか否かの検出を行うものが開示されている。
【0006】
前記目的を達成するため、本発明にあっては次のような解決手法を採択してある。すなわち、請求項1に記載のように、
歩行者を撮像する撮像手段と、
前記撮像手段により撮像された画像から得られる歩行者の支持基底面と体重心位置との関係に基づいて、歩行者が左右の横方向へ移動することを判定する回避行動判定手段と、
を備えているようにしてある。












コメントを残す